Lidar survey
The terrestrial LiDAR in a few words
The LiDAR (Light Detection And Ranging) technology appeared in the 1960s. It uses electromagnetic waves pulses emitted by a laser in the visible or infrared spectrum. It is used in many fields, among which, for geostructures and associated challenges, to carry out rapid and precise digital 3D surveys of: cavities, underground developments, tunnels, rock fronts, civil engineering structures.Three types of terrestrial laser scanner are currently available:
The “time-of-flight” or pulse scanner. This type of instrument determines the scanner-object distance by measuring the time between the transmitted pulse and the received one.
The “phase-shift” laser scanner. In this case, the scanner-object distance is determined by comparing the phases of the waves emitted by the scanner towards the object and the phases of the returning waves using a digital phasemeter.
The “hybrid” laser scanner. This latter uses the “Wave form Digitizer” (WFD) technology which mixes both previous ones.
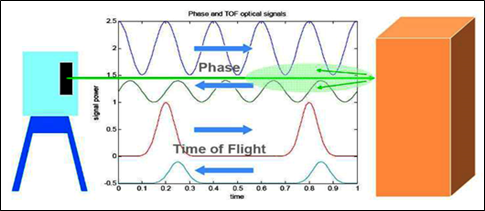
Working illustrations of the laser scanners types (Hiremagalur et al., 2007): top: phase-shift scanner; bottom: time-of-flight scanner
Which deployment?
The scanner is a movable measurement device, it is autonomous in energy and might be compatible with remote management and data transfer technologies.Field deployment is quite easy and quick, even if the device can weigh up to twenty kilograms for some equipment.
Before a field survey, it is important to find open positions (called stations) with a viewing angle as much as possible in front of the object to be digitized, then to configure the device in an ad-hoc manner. Should successive 3D surveys be performed for periodic monitoring, the position of the stations of the first survey must be marked and recorded with a centimeter-resolution GNSS receiver. The objective is to guarantee the same characteristics and the same viewing angles between each survey by performing them strictly in the same places in order to compare the same 3D point clouds.
The duration of the measurement cycle depends on the device (its range) and the distance from the target.
In-situ installation and data digitization are quickly done: the installation takes at most half an hour. The duration of the measurement for a station is variable depending on the device used, the implementation context and the settings (angular resolution, frequency, taking pictures, etc.).
However, to digitize an object with good accuracy, to cover the entire scene and to avoid possible mask effects, several stations are generally necessary.
Depending on the scanner used, its configuration and the distance from the object to be scanned, the accuracy may vary from millimeter to centimeter.
Which results for the ground and underground hazards?
The first result of a LiDAR survey is a 3D point cloud (or several point clouds performed from several stations put together), from which a precise and detailed digital elevation model (DEM) can be generated.This DEM enables to reconstruct the precise morphology of the studied site. It can be the starting point for other analyzes, e.g. to highlight mass movements by comparison of successive DEMs, to characterize the displacements, to estimate the displaced volumes, or to carry out other types of spatial analyzes.
These applications are based on post-processing operations which can quickly become cumbersome and complex. Indeed, it is not uncommon to work with clouds of tens of millions of points that can correspond to tens of gigabytes of data. In addition a good knowledge of the software and a good expertise of the results are necessary to get familiar with data processing.
Range and complementarity of tools available at Ineris
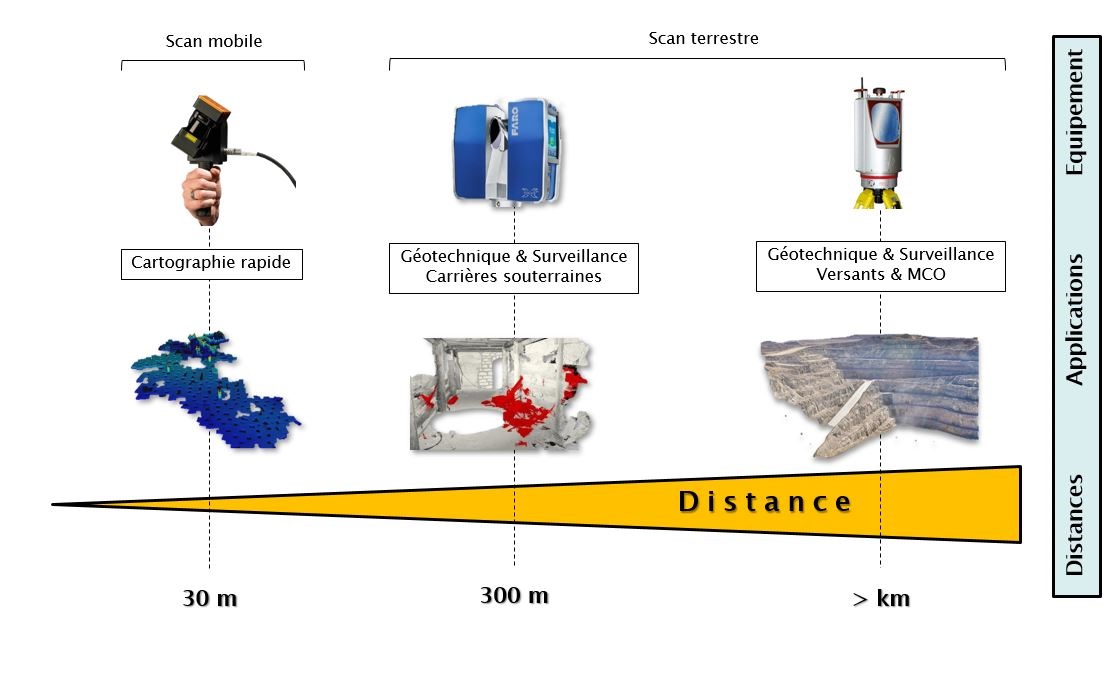
Ineris has two terrestrial scanners which can be used together, but also for their own use:A tripod-fixed long-range “time-of-flight” scanner (up to 4-km range in good weather conditions), enabling to be relatively far from the observation area (e.g. monitoring a mountain slope from the opposite slope) while keeping a centimeter or even a millimeter precision. Because of its weight, a lighter short-range scanner is rather used for too cramped or steep places.
A tripod-fixed short-range “phase-shift” scanner (maximum 300-m range), mainly used underground. Its light weight and intuitive configuration make it a very simple tool. It is then used in addition to the long-range scanner, as it is easier to go closer to the interest area.
Ineris also has a mobile scanner. It is a light manually very-short-range rotary scanner (up to 30 m indoors, 15 m outdoors), which allows to wander in the area to be scanned.
Ineris also has a suite of LiDAR data processing tools and software.
In addition, the 3D visualization module available in the e.cenaris web-monitoring solution allows interactive visualization of point clouds and of other results from LiDAR surveys.
Tools
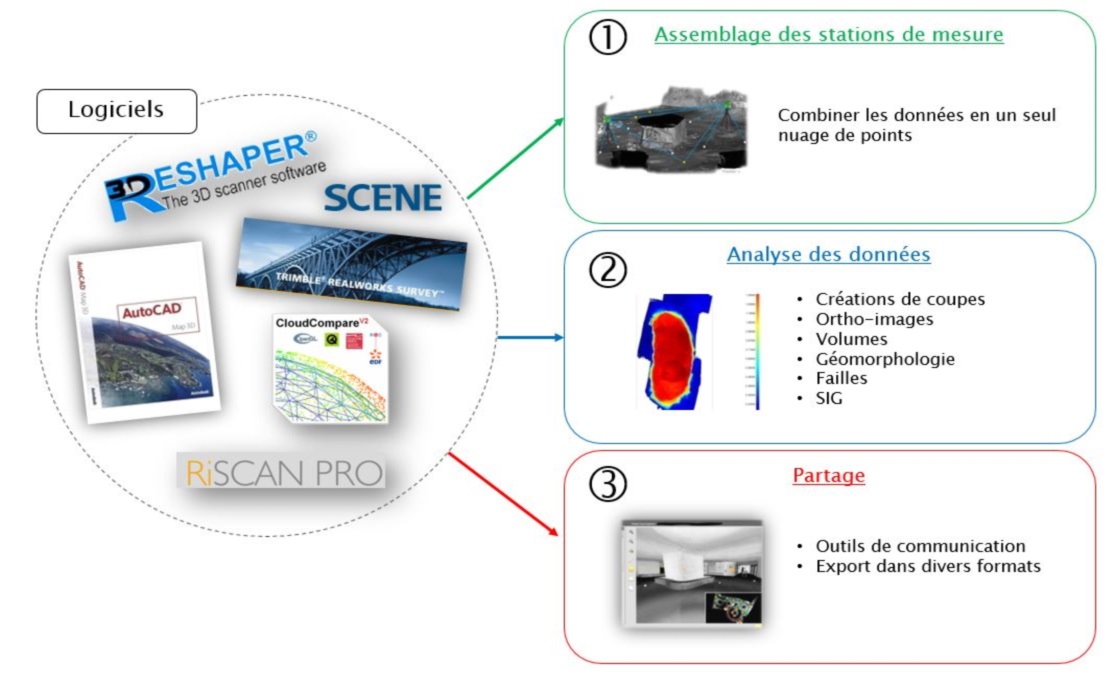
Software
Links:
⇒ FP: The 3D laser scanner at the service of geotechnical expertise⇒ Report: Review of RADAR and LIDAR technologies on the market
⇒ News: Acquisition of a latest-generation 3D long-range laser scanner